Projects
|
|
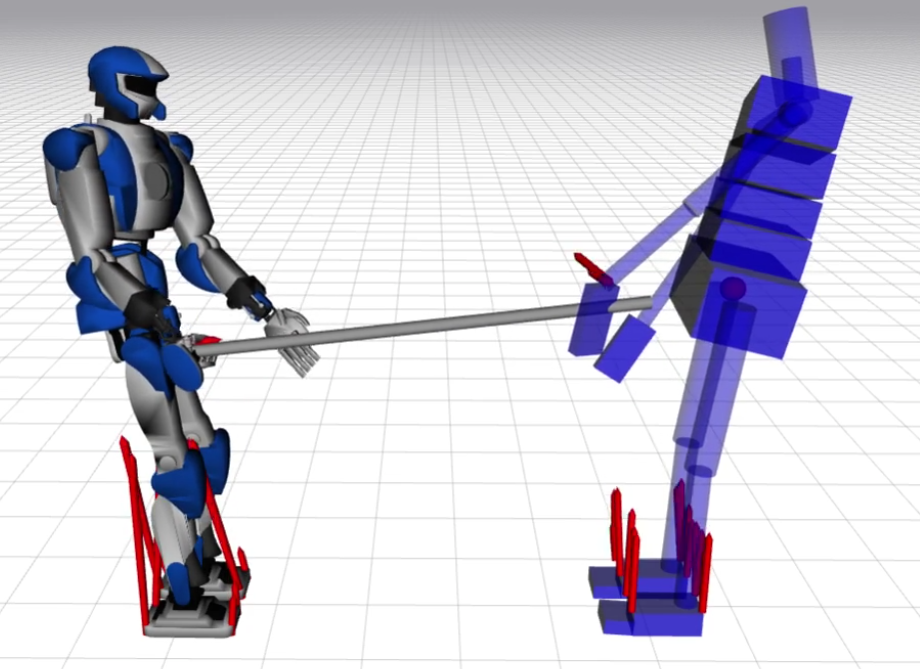 |
At Inria Nancy (France), working on application of multi-robot QP controllers for modeling the dynamics of a humanoid's interactions with its environment (manipulated objects, humans, etc.). |
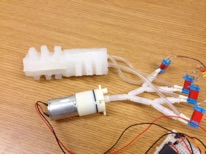 |
At Bioinspired Robotics and Design Lab at UCSD, under Professor Mike Tolley and Dylan Drotman.
Presented at ICRA 2015 in Seattle.
|
 |
Silicone-based skin with conductive liquid sensors. Used as tactile sensors and as sensing mechanism for pneumatic actuators. |
|
|
 |
Implementation of 3D reconstruction algorithm for event-based cameras. |
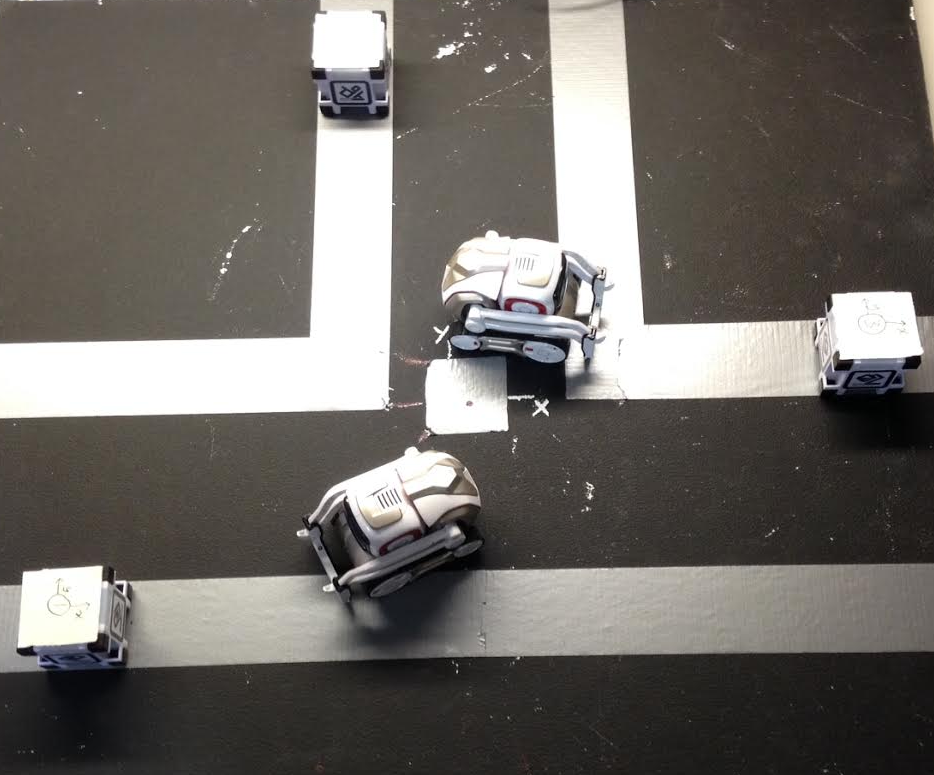 |
Drivers and planning algorithms for centralized multi-robot planning on Anki Cozmos. |
|
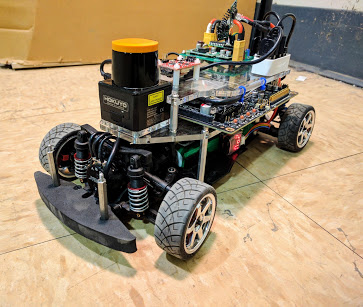
CMU MRSD program capstone project. Trajectory optimization for an autonomous vehicle, with detailed dynamics model that can account for tire slip/drifting. |
|
Senior design project, working with UCSD Health and Dr Frank Talke. Our work formed the foundations for this. |